

Automatic driving technolgogy
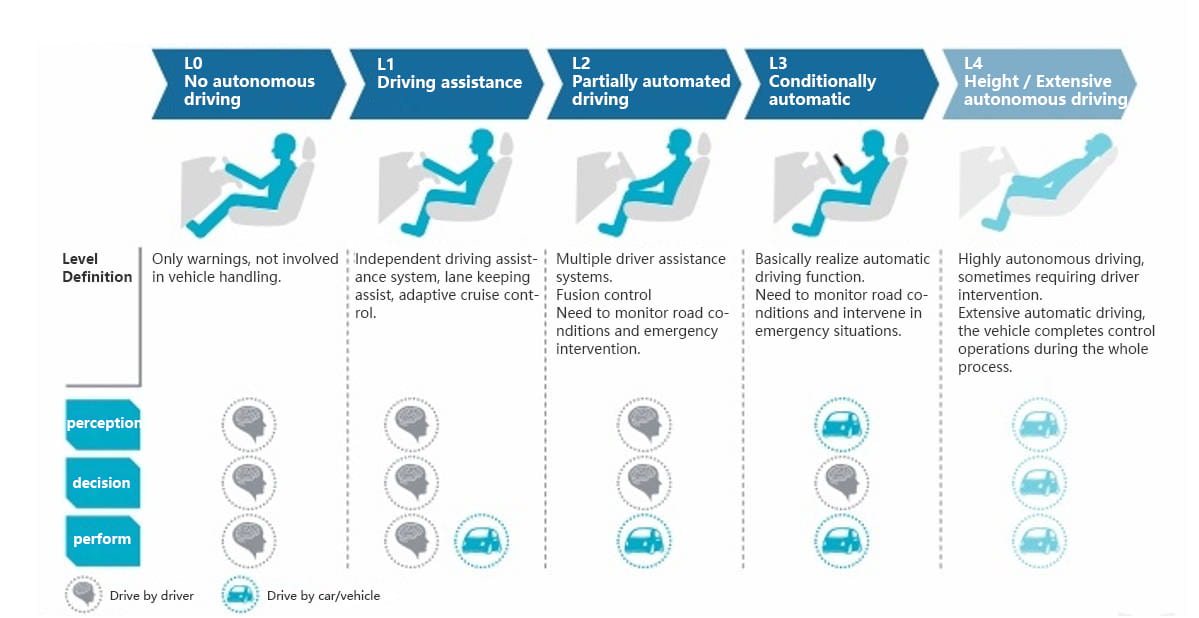
Automatic driving can be divided into five stages according to the degree of machine intervention. After L3, the machine begins to take over the perception and control of the dominant vehicle. At present, the technology is in the transition stage from L2 to L3.
● Stage I: realize automatic driving of single vehicle under static environment.
● Stage II: automatic driving of cluster vehicles under static environment.
● Stage III: realize cluster automatic driving in the actual environment with good working conditions.
Note: the following are the implementation plans of the first stage.
Implementation for automatic driving of mine vehicle
Components of an automated driving system
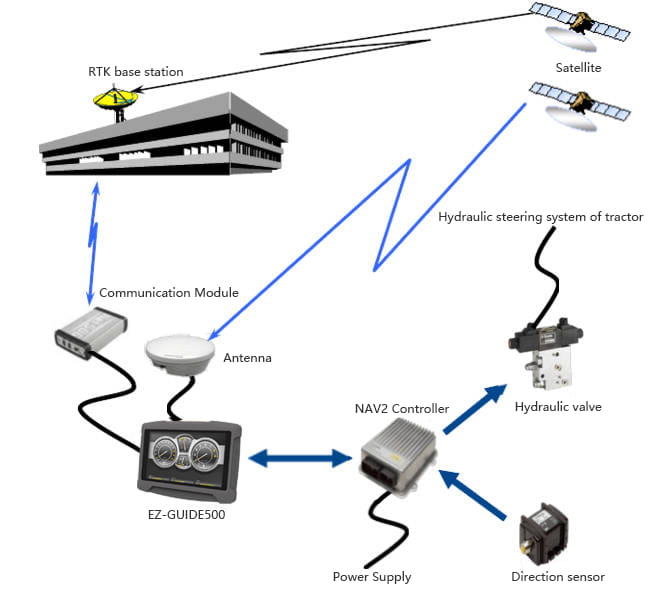
The automatic driving system is mainly divided into two parts: the navigation control system and the vehicle control system.
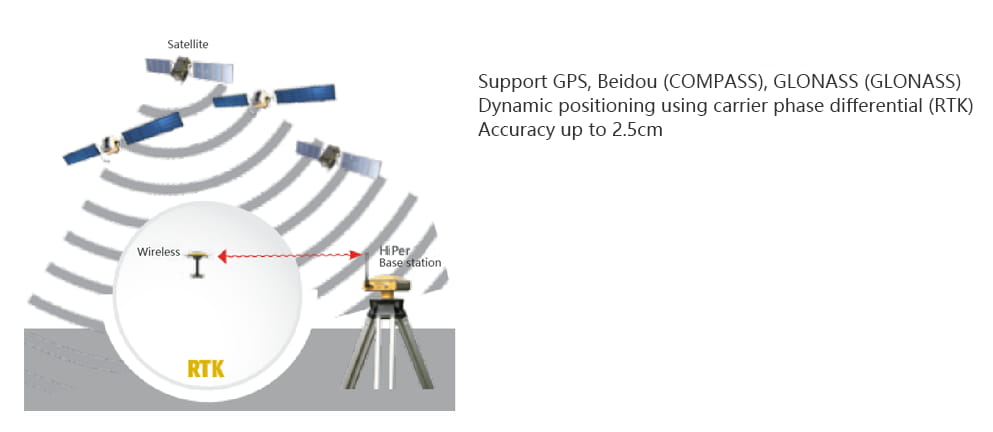
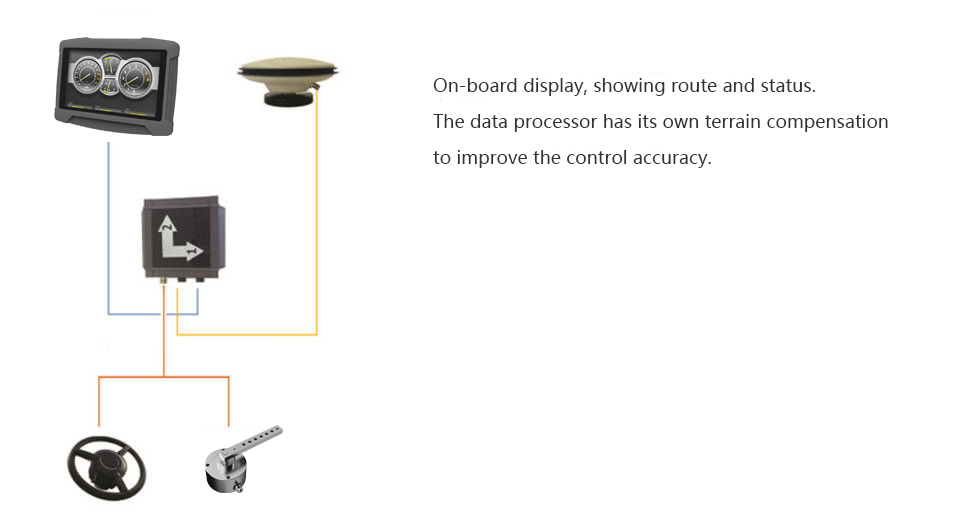
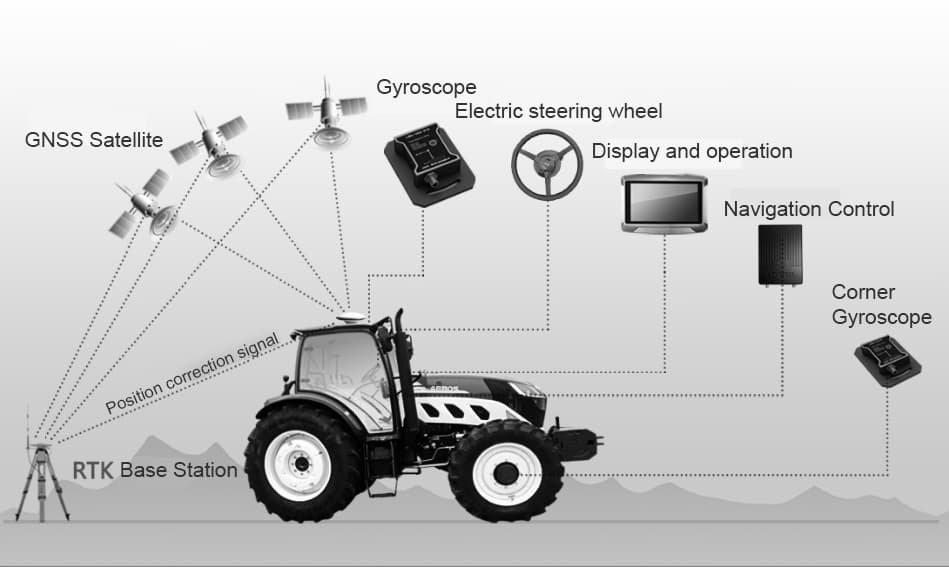
The navigation control system includes:● Vehicle control part: process the satellite signal received by the antenna and the differential signal sent by the RTK base sation in real time, calculate the high-precision coordinates of ±2.5 cm, and transmit the high-precision coordinate data to the vehicle controller. Including: navigation terminal, satellite signal rteceiver, controller, angle sensor, etc.
● RTK base station: Receive satellite signals, and output high-precision CMR+ differential data in real time to establish a small-scale high-precision positioning coordinate system; including: fixed satellite signal receivers, data transmission stations, etc.
● Navigation terminal: vehicle parameter input, automatic navigation information display settings, etc.
● Satellite signal receiver (antenna): Receive real-time satellite signals and differential signals from RTK base stations, and transmit high-precision coordinate data to the vehicle controller.
● Controller (data processor): Receive high-precision latitude and longitude information in real time, and turn signals from the direction sensor, and issue real-time steering commands to the electronically controlled steering wheel based on the planned path information.
● Steering system: Receive the control signal sent by the vehicle controller in real time, and convert the control signal into a rotation signal to control the steering of the vehicle.
● Direction sensor: monitor the steering angle of the vehicle in real time, and output the steering angle information to the controller, so that the controller can realize the closed-loop control of the direction.
Vehicle control systems include:
● Vehicle controller: control basic actions, vehicle obstacle avoidance, vehicle remote control.
● Start: Send control commands to the controller through the mobile terminal, and the controller controls the engine to start through the CAN bus.
● Turn off: After the vehicle is in place, the controller controls the engine to turn off through the CAN bus.
● Throttle: During driving, according to the requirements, the controller controls the engine speed through the CAN bus.
● Shifting: During the driving process, according to the requirements, the controller controls the shifting of the gearbox through the CAN bus.
● Braking: The controller controls the braking system by outputting IO signals.
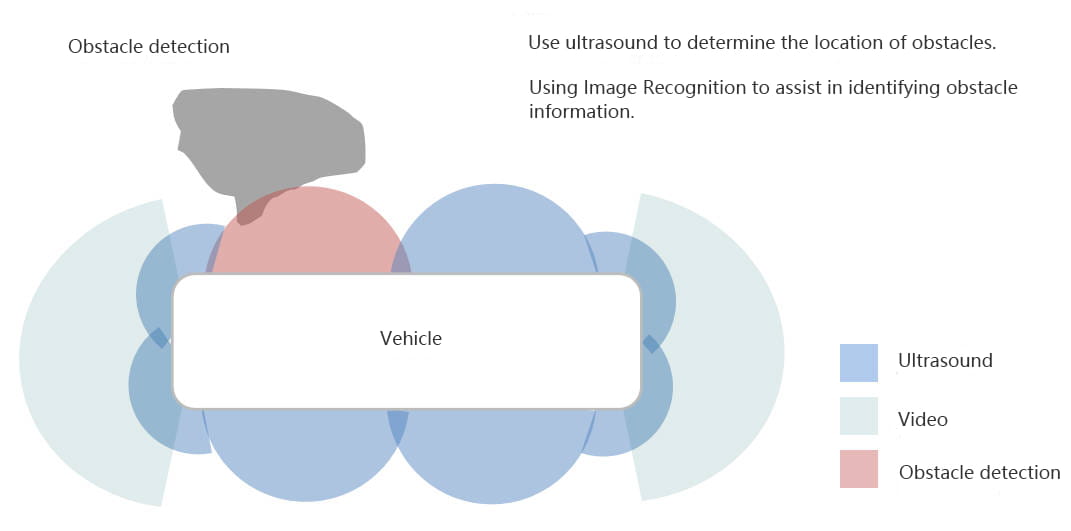
● Vehicle obstacle avoidance: The obstacle information is detected by the ultrasonic sensor, and the signal is sent to the controller, and the controller outputs the IO signal to control the vehicle braking; path travel.
● Remote control: control the basic actions of the vehicle through the remote control.
System hardware composition

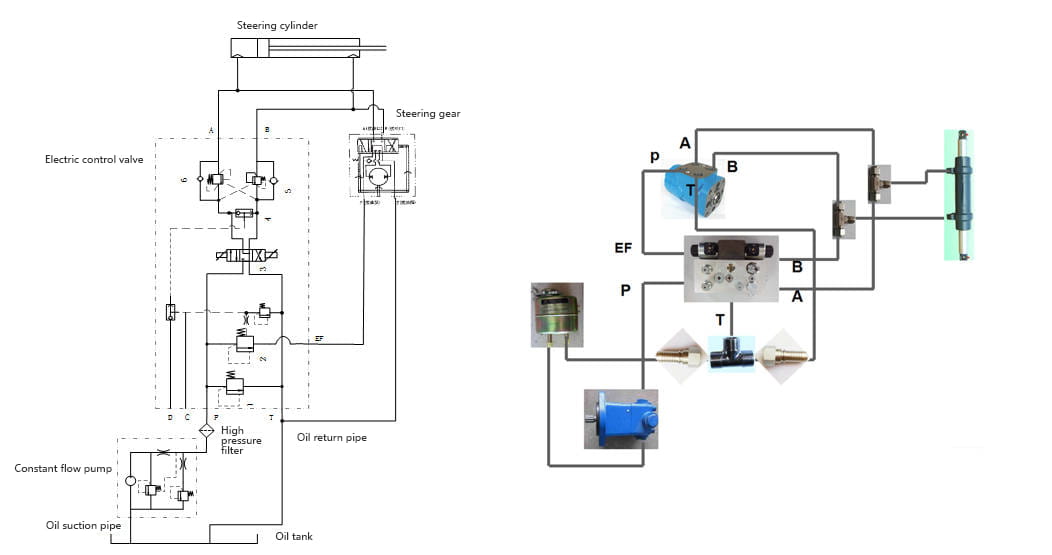
Hydraulic power steering system
● Under the steering control state, the hydraulic flow and direction in the steering cylinder are directly controlled by the proportional valve, and the steering execution speed is fast.
● The proportional valve has high precision and can achieve high steering control precision.
● The load sensing design makes the steering speed only related to the control signal and independent of the load, and the system is more energy efficient.
● Does not affect the original manual steering function.
● It adopts integrated design with compact structure and high reliability.
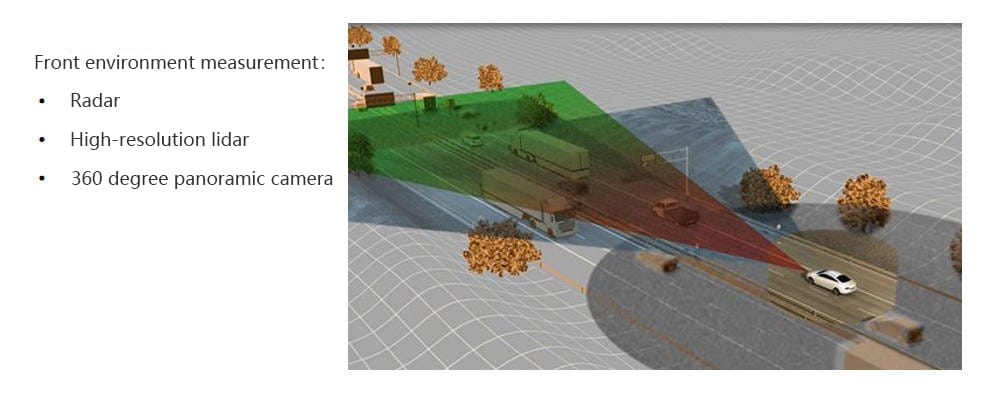
Obstacle Detection Solution
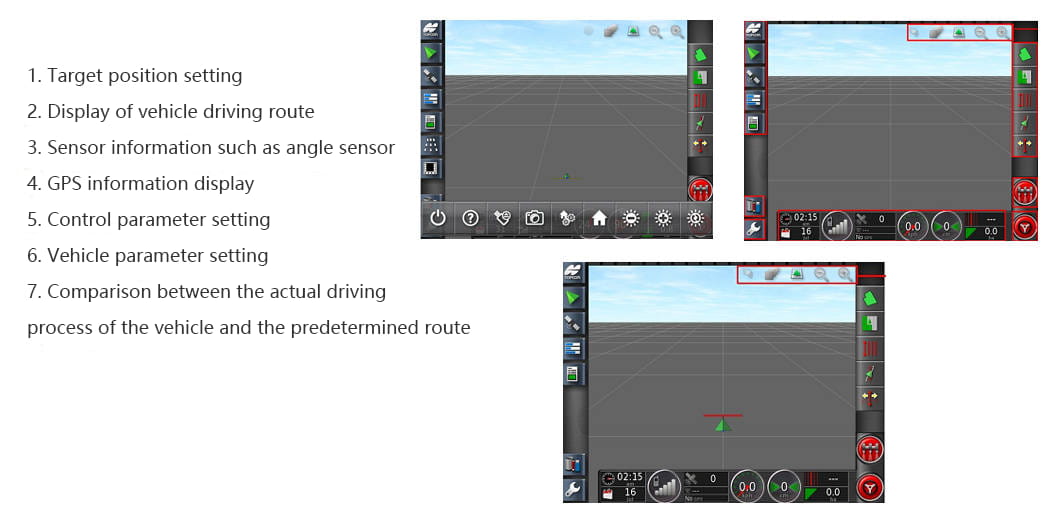
Human-computer interaction design
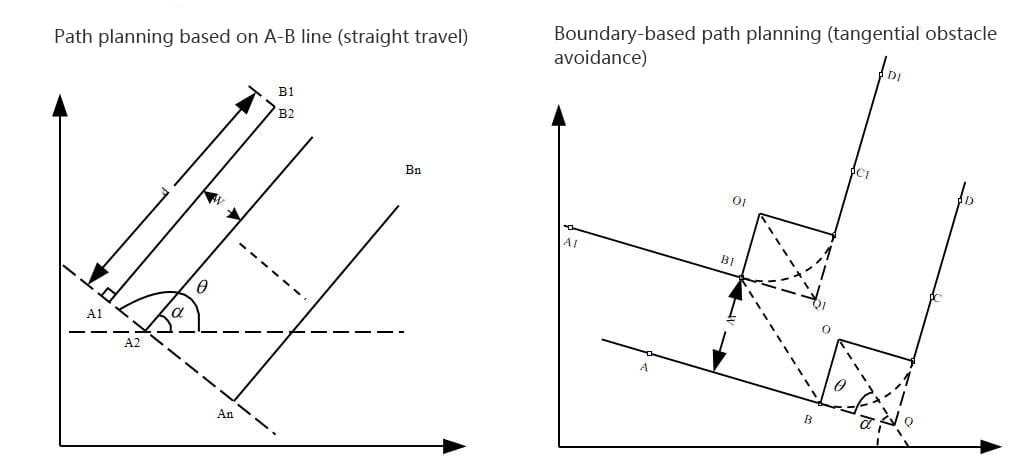
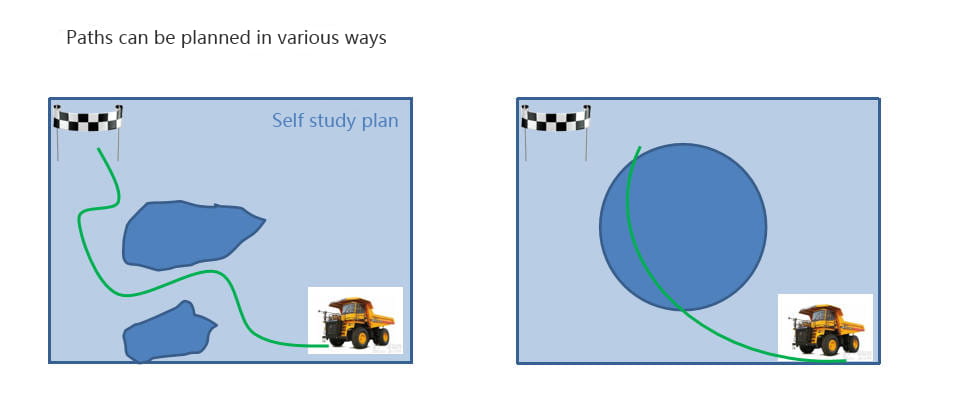
Navigation path planning
System advantage
Agricultural machinery automatic driving implementation scheme
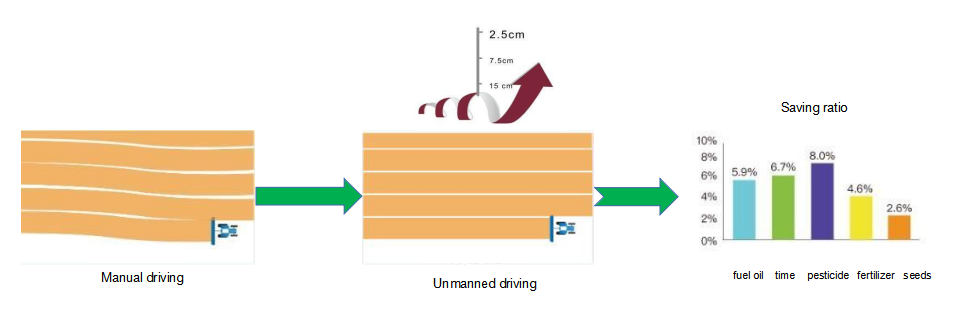
The automatic navigation and driving system of agricultural machinery has gradually entered the field of vision of the people, which can not only reduce the operation difficulty and labor intensity of the driver in the operation of agricultural machinery, but also reduce the operation time of the agricultural machinery. Harvesting and other operations have played a great role in operations that require high linear accuracy and row accuracy, avoiding land waste and improving operation efficiency.
System Configuration
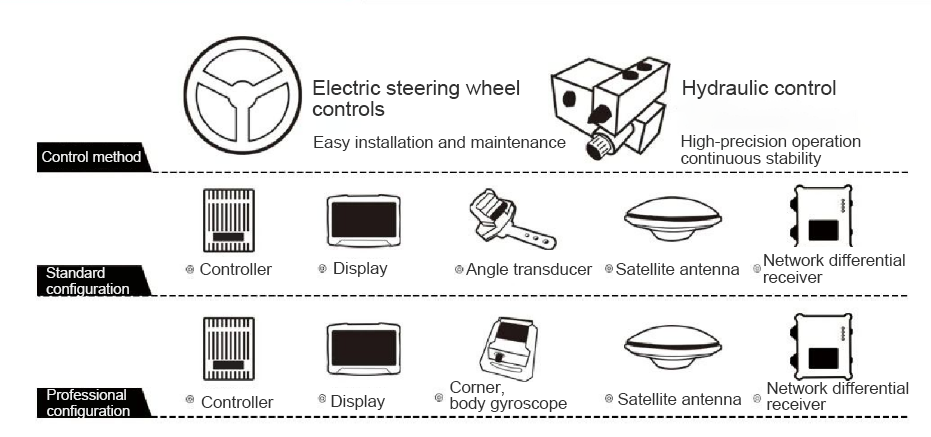
Unmanned, high precision, high efficiency, easy operation, all-weather operation
