
無人駕駛技術
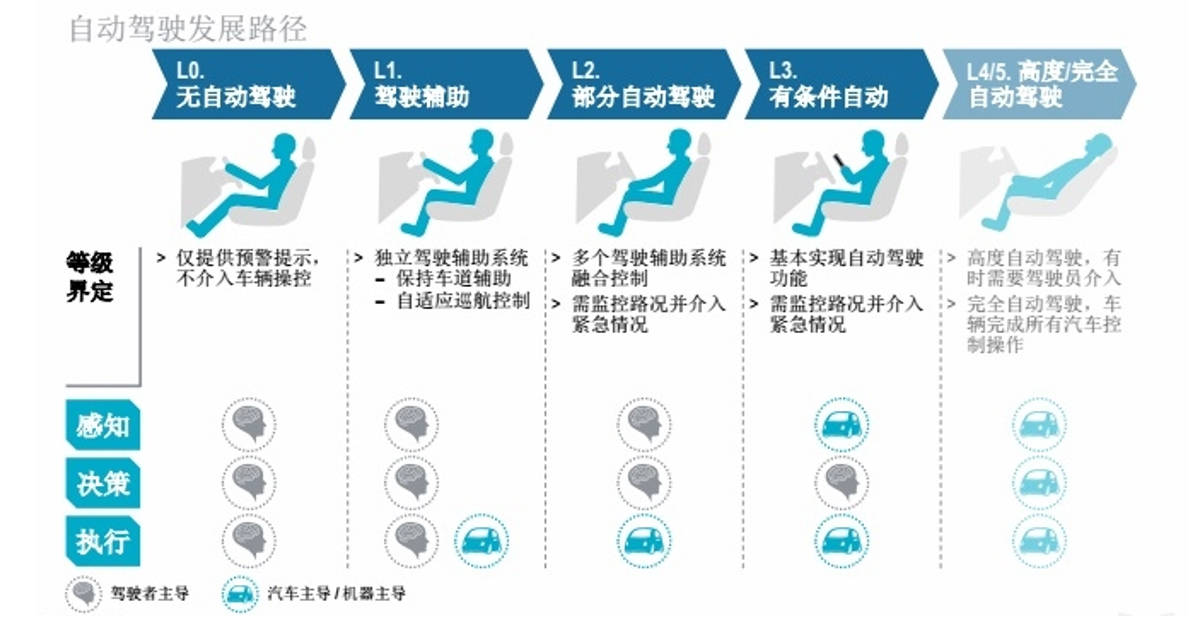
自動駕駛按照機器介入程度分(fēn)爲五大(dà)階段,在L3階段後,機器開(kāi)始接管主導車(chē)輛的感知(zhī)和控制。
目前技術整體(tǐ)處于L2到L3的轉變階段。
● 第一(yī)階段:靜态環境下(xià)實現單個車(chē)輛自動駕駛
● 第二階段:靜态環境下(xià)實現集群車(chē)輛自動駕駛
● 第三階段:工(gōng)況較好的實際環境中(zhōng)實現集群自動駕駛
注:以下(xià)所述均爲第一(yī)階段的實施方案
礦車(chē)自動駕駛實施方案
自動駕駛系統的組成
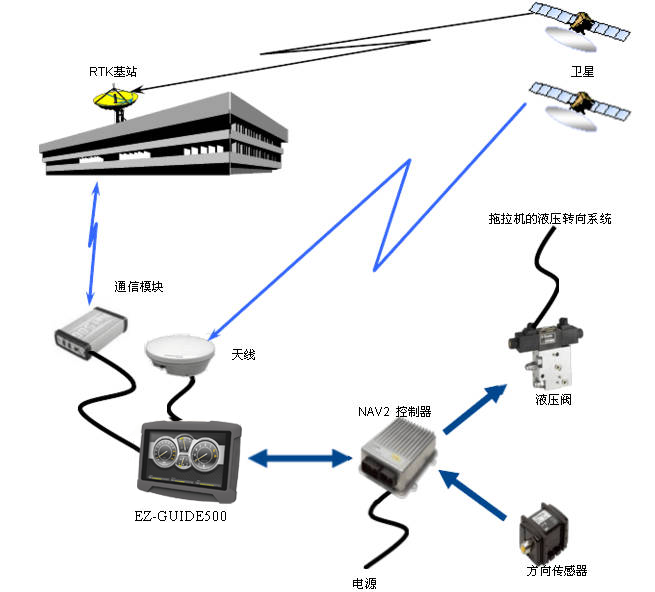
自動駕駛系統主要分(fēn)爲兩部分(fēn):導航控制系統和車(chē)輛控制系統。
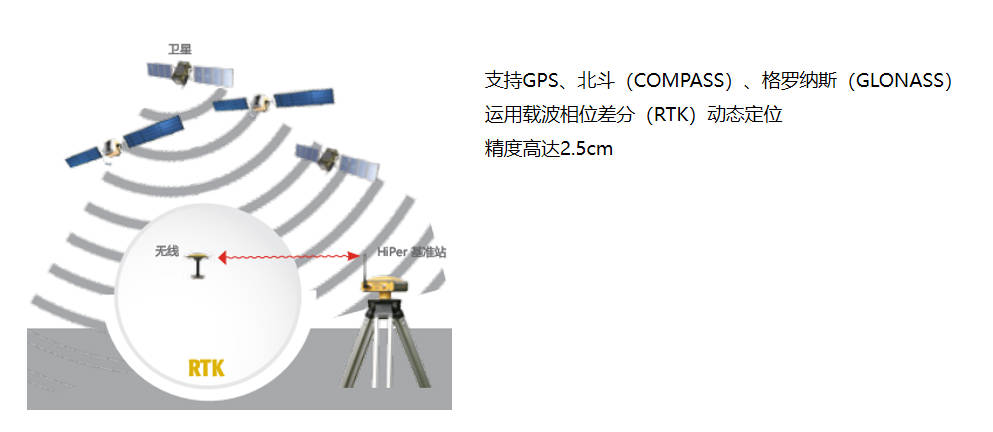
導航控制系統包括:● 車(chē)載控制部分(fēn):實時處理天線接收到的衛星信号和RTK基站發出的差分(fēn)信号,解算出±2.5厘米的高精度坐标,并将高精度坐标數據傳輸給車(chē)輛控制器。包括:導航終端,衛星信号接收器,控制器,角度傳感器等;
● RTK基站:接收衛星信号,并實時輸出高精度的CMR+差分(fēn)數據,建立小(xiǎo)範圍高精度定位坐标系;包括:固定的衛星信号接收器,數據發送電(diàn)
● 導航終端:車(chē)輛參數輸入,自動導航信息顯示設置等。
● 衛星信号接收器(天線):實時接收衛星信号和RTK基站發出的差分(fēn)信号,并将高精度坐标數據傳輸給車(chē)輛控制器。
● 控制器(數據處理器):實時接收高精度經緯度信息,方向傳感器的轉向信号,依據已規劃的路徑信息,向電(diàn)控方向盤發出車(chē)輛的實時轉向命令。
● 轉向系統:實時接收車(chē)輛控制器發出的控制信号,并将控制信号轉換爲轉動信号,控制車(chē)輛轉向。
● 方向傳感器:實時監測車(chē)輛的轉向角度,将轉向角度信息輸出給控制器,讓控制器實現方向的閉環控制。
車(chē)輛控制系統包括:
● 車(chē)載控制器:控制基本動作,車(chē)輛避障,車(chē)輛遙控。
● 啓動:通過移動終端給控制器發送控制指令,控制器通過CAN總線控制發動機啓動;
● 熄火(huǒ):車(chē)輛到位後,控制器通過CAN總線控制發動機熄火(huǒ);
● 油門:行駛過程中(zhōng),根據要求,控制器通過CAN總線控制發動機轉速;
● 換擋:行駛過程中(zhōng),根據要求,控制器通過CAN總線控制變速箱換擋;
● 刹車(chē):控制器通過輸出IO信号,控制刹車(chē)系統;
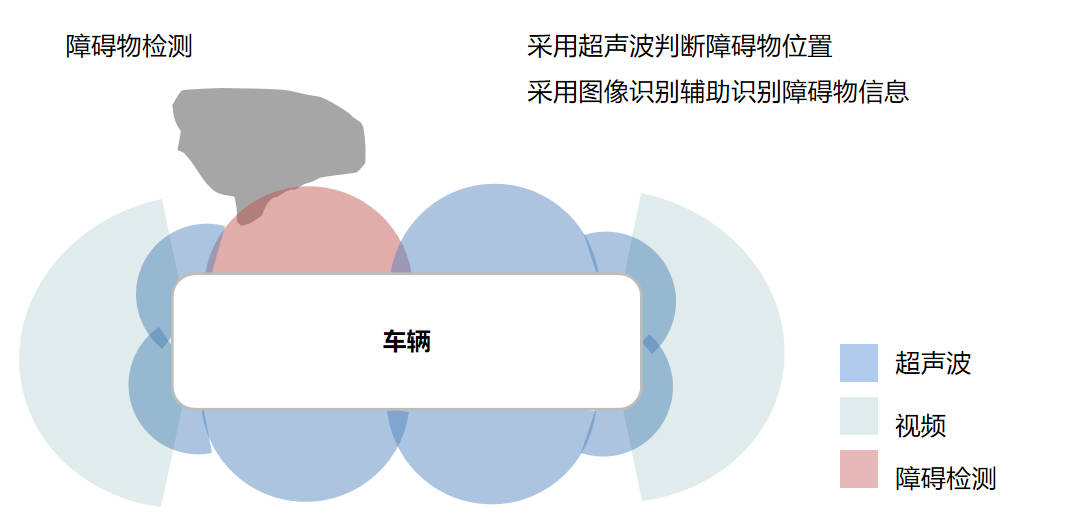
● 車(chē)輛避障:通過超聲波傳感器檢測障礙物(wù)信息,将信号發給控制器,控制器輸出IO信号控制車(chē)輛制動;障礙物(wù)移除後,等待安全時間間隔後,解除制動,控制車(chē)輛繼續按原路徑行駛;
● 遙控器:通過遙控器控制車(chē)輛基本動作;
系統硬件構成

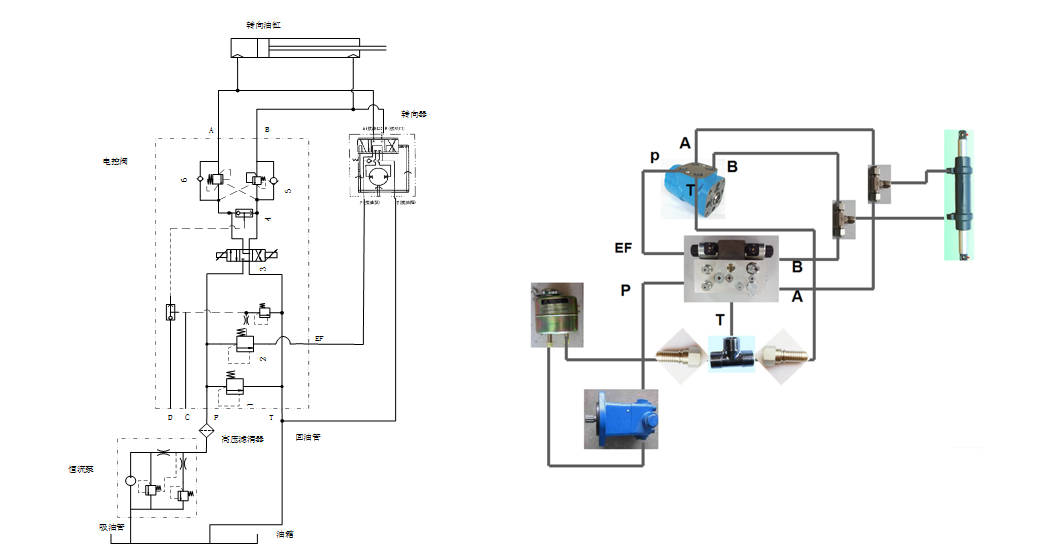
液壓助力轉向系統
● 在轉向控制狀态下(xià),由比例閥直接控制轉向油缸中(zhōng)的液壓流量和方向,轉向執行速度較快。
● 比例閥的精度高,可以實現較高的轉向控制精度。
● 負荷傳感設計使轉向速度隻與控制信号有關與負載無關,且系統更節能。
● 不影響原有的手動轉向功能。
● 采用一(yī)體(tǐ)化集成設計,結構緊湊,可靠性高。
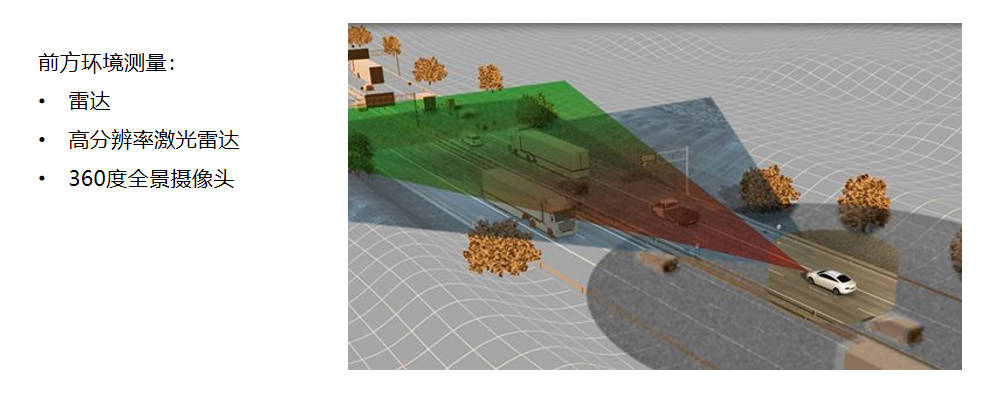
障礙檢測方案
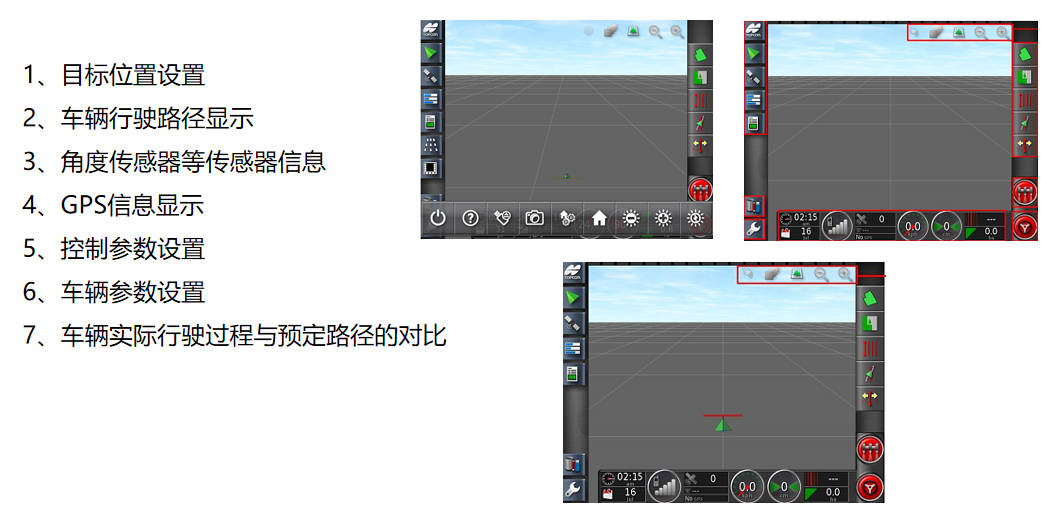
人機交互設計——車(chē)載顯示屏顯示内容
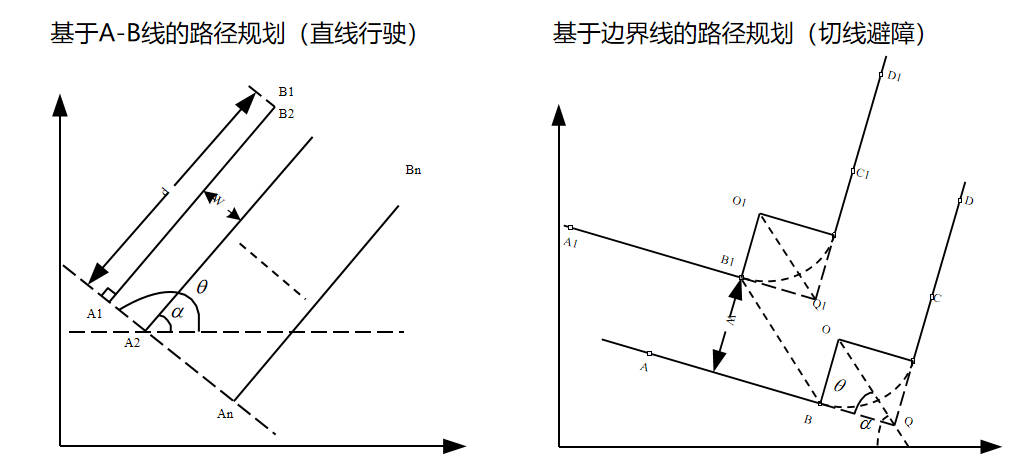
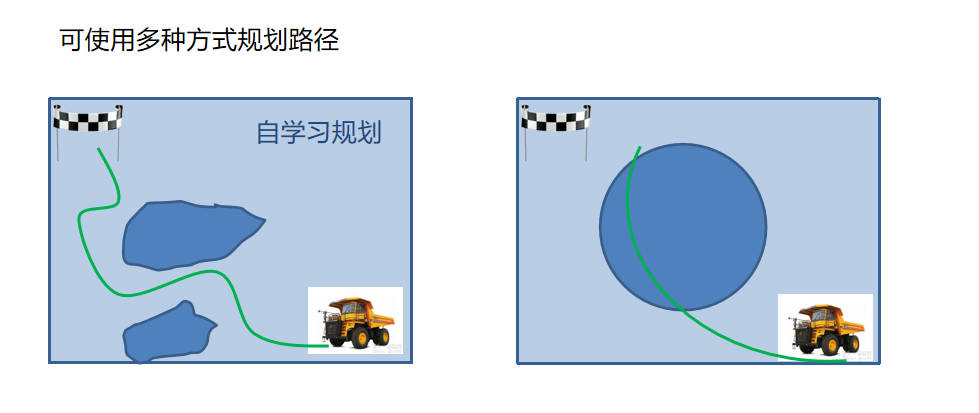
導航路徑規劃
系統優勢

農機自動駕駛實施方案
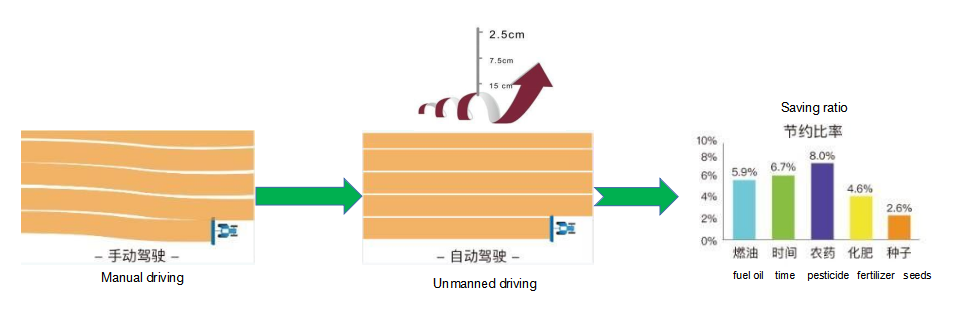
農機自動導航駕駛系統逐漸走進百姓的視野,不僅能夠降低農機作業中(zhōng)駕駛員(yuán)的操作難度和勞動強度,同時降低農機的作業時長,在播種、耕整地、插秧、覆膜、起壟、打藥、收獲等對直線精度和對行精度要求高的作業中(zhōng)更是起到了極大(dà)的作用,避免了土地的浪費(fèi),提升了作業效率。
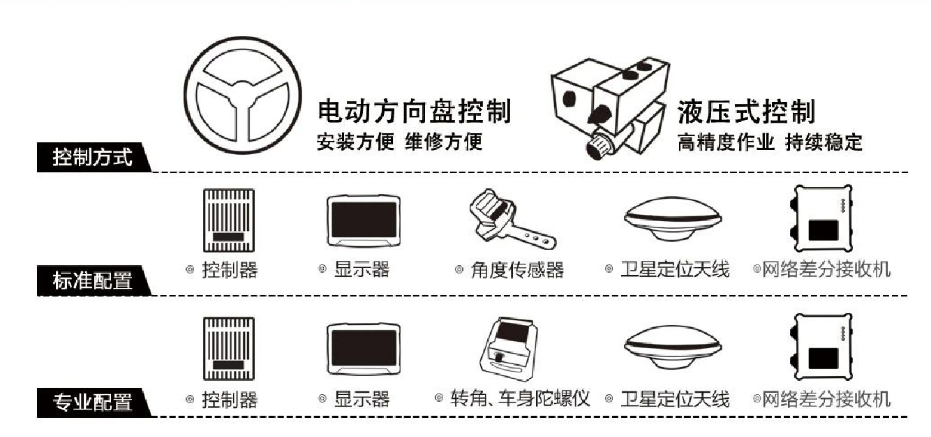
系統配置

無人化、高精度、高效益、輕松作業、全天候作業
總部:上海市松江高科技園區九泾路470号A座
熱線:18916808200
電(diàn)話(huà):021- 3782 9910
傳真:021- 5186 2016
郵箱:hy@smartsh.com

