

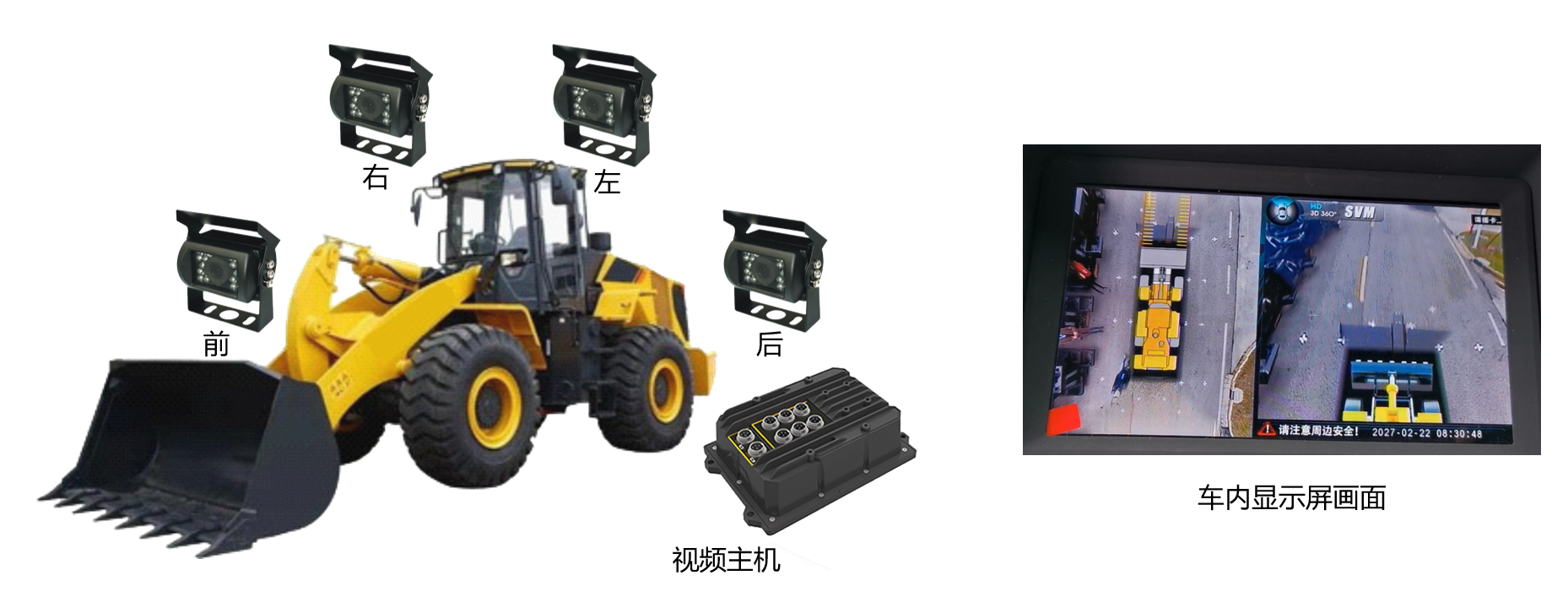
360度全景影像
• 在車(chē)輛的前後左右位置安裝四個全景攝像頭,捕捉車(chē)輛四周的畫面,通過360主機的算法運算,最終呈現出車(chē)輛四周的全景畫面
• 若車(chē)輛過長,可在左右兩側增加攝像頭數量(最大(dà)可加至6路),來達到全景覆蓋的效果
• 前行車(chē)軌迹,車(chē)輛前後車(chē)架連接處,裝有霍爾傳感器,與360主機相連接,通過測量外(wài)部磁場的變化來實時顯示車(chē)輛行進的軌迹,對行走狀态進行提前預判
• 倒車(chē)軌迹,當車(chē)輛挂入倒擋時,顯示器主圖像顯示區域顯示車(chē)輛倒車(chē)畫面,車(chē)輛軌迹線由前切到後。
應用案例

前後行車(chē)軌迹
• 前行車(chē)軌迹,車(chē)輛前後車(chē)架連接處,裝有霍爾傳感器,與360主機相連接,通過測量外(wài)部磁場的變化來實時顯示車(chē)輛行進的軌迹,對行走狀态進行提前預判
• 倒車(chē)軌迹,當車(chē)輛挂入倒擋時,顯示器主圖像顯示區域顯示車(chē)輛倒車(chē)畫面,車(chē)輛軌迹線由前切到後
